本文转载自“澎湃新闻”。
粒子系统
传统意义上,机器人由许多复杂的部件组成,其中任何一个部件发生故障都可能使整个机器人停止工作。当地时间3月21日,发表在顶级学术期刊《自然》(Nature)的封面论文论证了一种崭新的机器人设计思路:用多个彼此独立的粒子单元组成机器人系统,粒子单元的数量变化和故障不会对系统产生影响。
该粒子机器人系统(particle robotics)由相互独立的粒子单元松散连接而成,可完成向目标光源运动、躲避障碍物、转移物体等任务。由于这种特殊设计,粒子机器人系统具有传统机器人系统所没有的灵活性、可扩展性和鲁棒性。鲁棒性(robustness)指的是系统的健壮性,是在异常和危险情况下系统生存的关键。

2019年3月21日《自然》封面图
《自然》评论称,该粒子机器人系统未来可应用于勘探、建筑和医学领域。例如,使用纳米级别的粒子机器人将药物运送到人体内难以达到的目标区域。
这项机器人科学领域的最新突破由麻省理工学院、哥伦比亚大学、康奈尔大学和哈佛大学的研究人员共同完成。
《自然》论文截图
论文第一作者、哈佛大学和麻省理工学院的机器人科学博士后研究员李曙光于3月24日接受了澎湃新闻的采访。
李曙光告诉澎湃新闻记者,他与几位合作者在模块化机器人领域研究多年,一直期待通过机器人技术来实现用简单“细胞”构建复杂“生物体”,或更广泛地讲,用基本机器人“粒子” 组合成各种各样的机器人“物体”。粒子机器人系统研究是他和同事们历时五年的研究成果。
简单“细胞”构建复杂“生物体”

粒子机器人系统
在生物系统中,大规模行为可以通过小规模细胞的随机移动和协调来实现。例如,在伤口愈合和癌症扩散过程中,活细胞发生聚集和集体迁移。
粒子机器人系统的粒子单元就是这些简单的“细胞”。
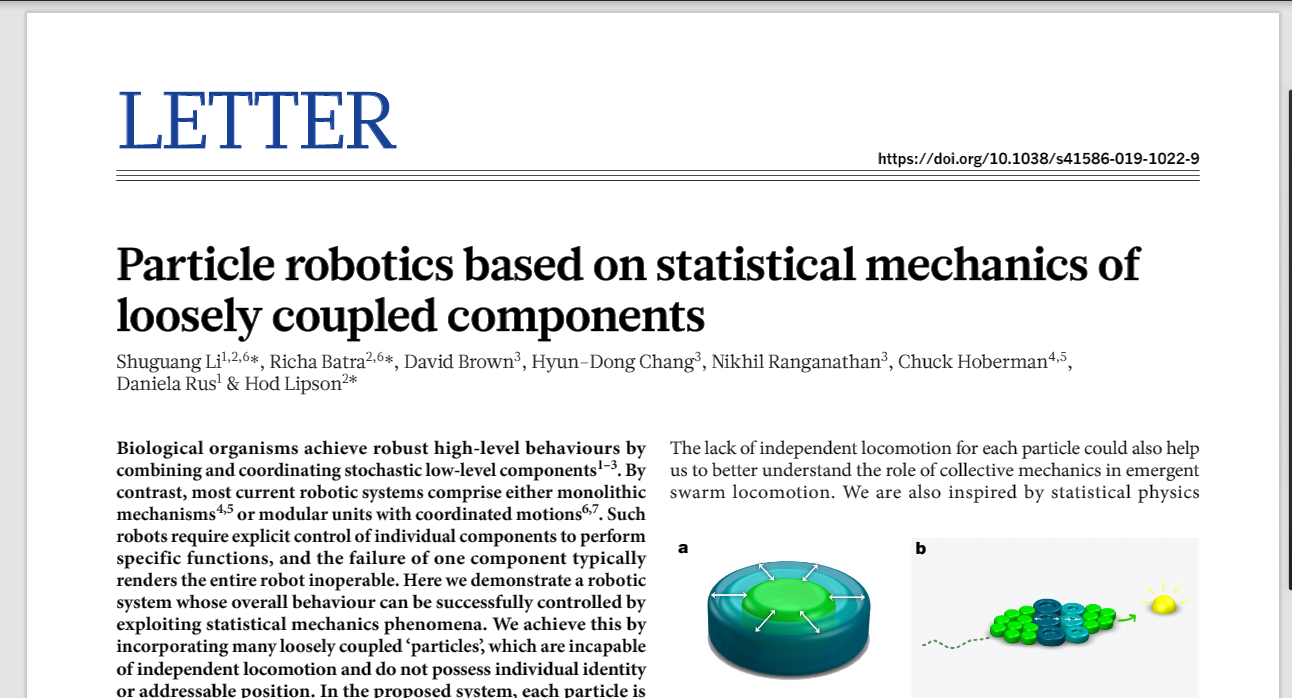
粒子机器人系统由20多个简单的圆盘形粒子单元组成,彼此之间由磁铁松散连接。粒子不能独立移动,也不能被单独操作,只能沿着圆盘的半径做出扩张和收缩的振荡动作。
在没有外部刺激的情况下,由这些圆盘形粒子组成的机器人系统只能随机移动。然而,当粒子被编程为通过调整直径来响应变化着的环境信号时,就会集体向信号源运动,也可以完成运输物体、越过障碍物等任务。在李曙光等人的研究中,振荡中的圆盘直径达15.5厘米到23.5厘米不等。
粒子机器人系统向光源移动
粒子机器人系统躲避障碍物。
粒子机器人系统搬运物体。
值得注意的是,粒子机器人系统中,没有一个粒子直接与另一个粒子通信或依赖于另一个粒子发挥作用。因此,即使在系统中添加或减少粒子,也不会对系统产生任何影响。研究人员发现,即使20%的粒子发生故障,系统也可以保持运动。这显示了粒子机器人在处理单个粒子单元故障时的稳健性。
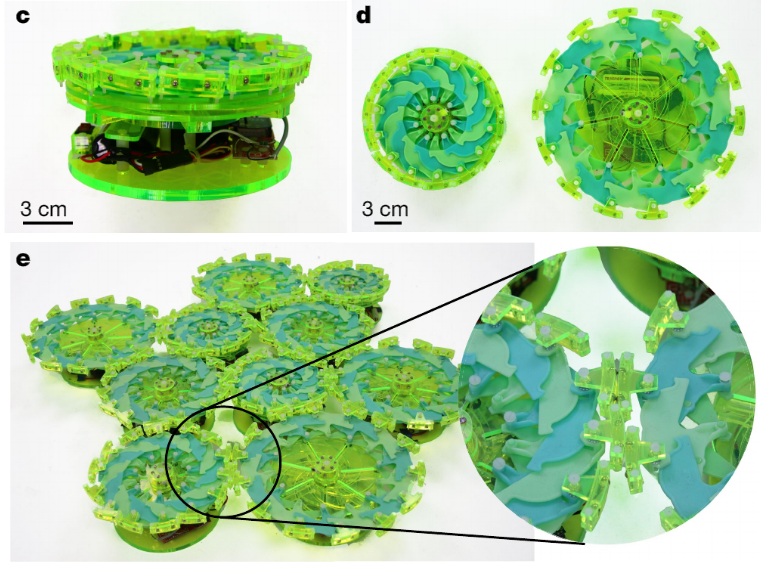

粒子机器人的结构
粒子机器人的每一个单元都有一个圆柱形底座,里面装有一个电池、一个小电机、检测光强度的传感器、一个微控制器和一个发送和接收信号的通信组件。圆柱形底座上面安装着一个可折叠儿童玩具,叫做霍伯曼飞行环(Hoberman Flight Ring)。它由若干个小面板连接而成,这些小面板可以被拉开并缩回状态,每个面板上安装着两个小磁铁。
研究人员对机器人粒子进行编程,使其按照精确的顺序展开和收缩,从而将整个系统推向目标光源。为了做到这一点,他们为每个粒子配备了一种算法,用以分析来自其他每个粒子的光强度信息,从而避免了粒子间的直接通信。这也是单个粒子的故障不会对系统产生影响的原因。
目前的粒子机器人系统还存在一定的缺陷。例如,由于粒子不能独立移动,系统在开始运行前需要手动配置以使粒子相互接合;实验中的粒子单元数量有限,系统速度较慢,体积较大等。
医疗、无人车和细胞生物学
粒子机器人其中一个令人激动的潜在应用场景是医疗——用纳米级别的粒子机器人将药物运送到人体内难以达到的目标区域。
在采访中,李曙光介绍了实现这一愿景的难度所在。
他认为,最大的难点在于如何把粒子做小,同时还能保持一定的功能,例如基本的运动和对环境的感知和响应。
在他看来,目前的挑战主要来自于新材料和微纳制造技术。他同时指出,当前的机器人设计方案并不适用于小尺寸的机器粒子,所以需要一种全新的、更简单可行的设计,例如使用新型功能材料来直接驱动“粒子”的基本运动,而不是电机或马达。
除了医疗,李曙光还提到,粒子机器人研究可能在多机器人控制领域有所应用,例如多个无人车,无人机之间的协同工作问题。
在他看来,这项粒子机器人系统研究“还有可能为细胞生物学研究提供一种新的思路和工具,其他研究者可以利用我们的平台来验证一些生物细胞集体迁移的理论和猜想”。
此外,李曙光向澎湃新闻记者透露了粒子机器人系统的下一步研究方向。
首先,他们想尝试研发三维版的机器“粒子”,组成三维立体结构,实现更多功能(目前的设计版本严格说还是在二维平面内运动)。
其次,他们想把机器人“粒子”做到更小尺寸和更大数量,例如同时运行上万个以上小于1立方厘米大小的“粒子”。
柔软安全并强健有力
这篇《自然》封面论文的第一作者李曙光毕业于西北工业大学,获博士学位,师从袁建平教授。2000年至2007年,李曙光在西北工业大学机电学院接受了本科和硕士教育。2008年至2009年,在西北工业大学攻读博士期间,李曙光被公派赴美国康奈尔大学进行联合培养。
2015年以来,李曙光在哈佛大学威斯研究所(Wyss Institute)担任博士后研究员。他同时也隶属于麻省理工学院计算机科学与人工智能实验室(CSAIL)。从2014年开始,李曙光一直与麻省理工CSAIL实验室主任Daniela Rus教授合作。
作为第一作者,李曙光在粒子机器人项目中负责机器人设计和制造、控制算法开发、物理实验和测试以及早期仿真程序的开发工作。
李曙光个人主页
粒子机器人系统是李曙光诸多机器人设计作品中的一个。
根据哈佛大学威斯研究所的官方新闻,2017年,李曙光与同事们设计出一款以折纸为灵感的、流体驱动的人工肌肉,可以举起自身重量1000倍的物品,成本却不到一美元。
他把这款折纸人工肌肉视为自己最满意的机器人作品,“因为它原理简单,制造廉价,容易使用,并且提供了多种多样的设计可能性”。

折纸人工肌肉
折纸是李曙光机器人作品中一个重要的灵感来源。他认为,基于折纸的机器人探索是一种便捷而且廉价的研究方式,同时折纸技术又能实现非常复杂的几何造型和变形结构。
2016年,李曙光参与了另一项折纸机器人研究。麻省理工学院、谢菲尔德大学和东京工业大学的研究人员开发了一种小型折纸机器人,它可以从吞下的胶囊中展开,并通过外部磁场操纵,爬过胃壁,去除吞下的纽扣电池或修补伤口。
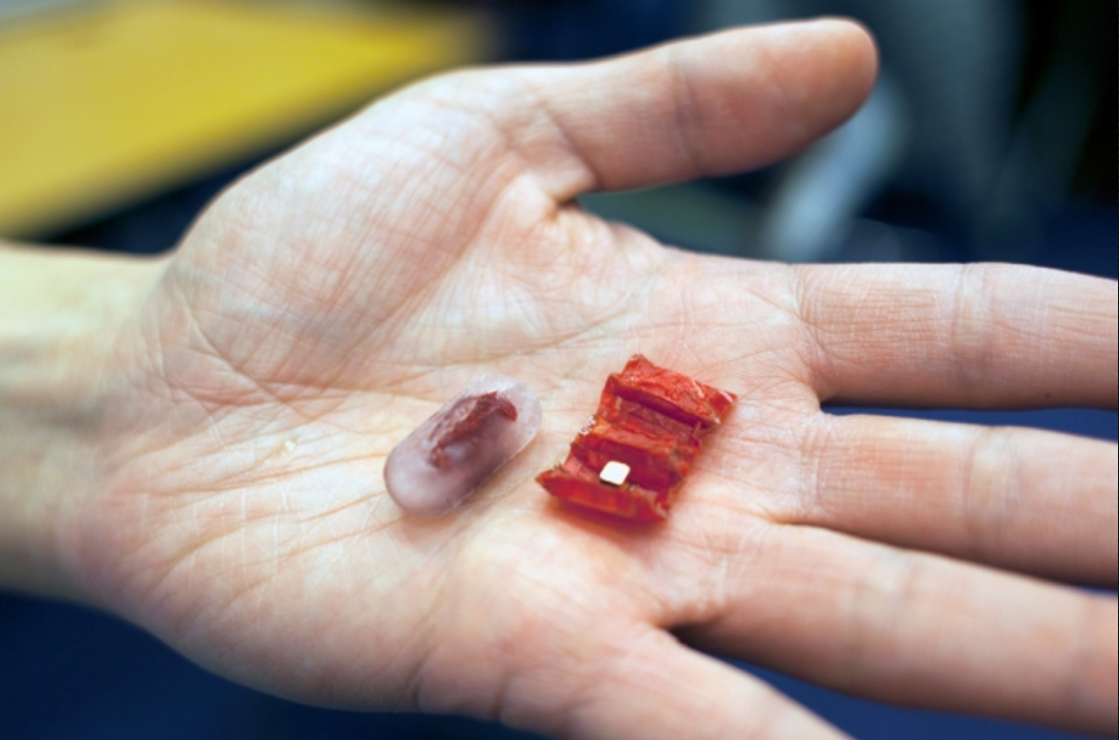
小型折纸机器人
2019年3月,麻省理工学院的新闻网站报道了一个柔软而有力的机器人手,可以抓取自身重量100倍的物体,例如锤子,酒杯,无人机,甚至一小朵西兰花。该研究由MIT和哈佛的四位本科生在李曙光的指导下完成。
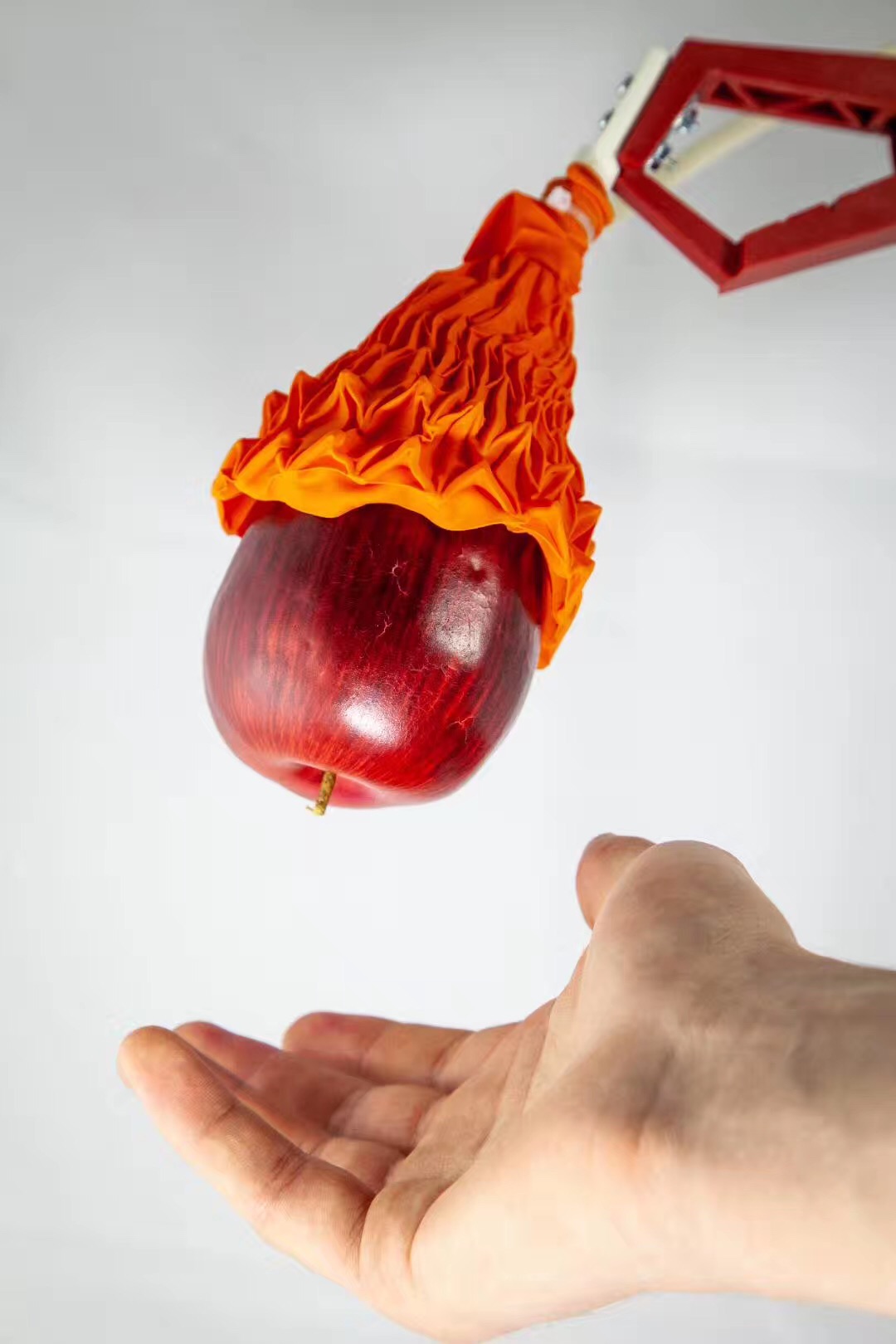
柔软而结实的机器人手
除此之外,李曙光还参与设计出可穿戴机器人、弹跳立方体等柔性机器人系统。
作为一个富有经验的机器人研究者,同时也是一个机器人迷,李曙光在采访中谈到了他心目中的理想机器人形象以及机器人与人类的关系。
他认为,理想中的终极机器人应该是会思考,能交流,甚至是有一定创造力的机器。他们并不需要看起来像人,而是被设计成最适合某种应用的形态。他觉得机器人与人类的最佳关系模式应该像“人类和宠物狗或猫之间的关系”。
最近,李曙光在研究如何结合柔软材料和硬质材料来设计不同于传统的新式机器人:柔软安全并且强健有力。他还提到,运用人工智能使得机器人拥有一定的创造力也是他一直试图突破的研究方向。






