本周《自然-通讯》发表的论文Hippocampal and prefrontal processing of network topology to simulate the future分析了人们在使用虚拟的伦敦地图找路时的脑部活动,阐明了人脑如何模拟未来路径以规划抵达目的地的路线。研究显示,人类找路的两个方面——可用的潜在路径数量和回忆街道布局,由海马体的两个不同部位处理。

伦敦道路地图。白色框线标出的区域是苏活区的一部分。Javadi et al.
穿越一片空间前往某个目的地正是一种与环境持续互动的过程。在这个过程中,我们每到一处就会面对数个潜在的路线分支,并对环境的拓扑结构作出反应。
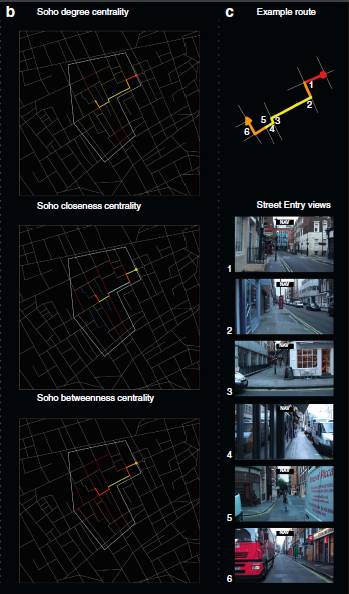
示例线路与沿路数个做参照的街景。Javadi et al.
以往的研究表明海马体能够提取过往的记忆用以模拟未来可能出现的状况,但之前对这一能力研究结果通常来自有某种事物起头的模拟行为。在自然状况下,与环境持续互动的过程中,海马体的具体作用方式尚不明确。另外,负责评估潜在未来行动的行为被认为是前额叶皮质的功能,但具体是它们的哪些区域来进行评估行为也并不明确。
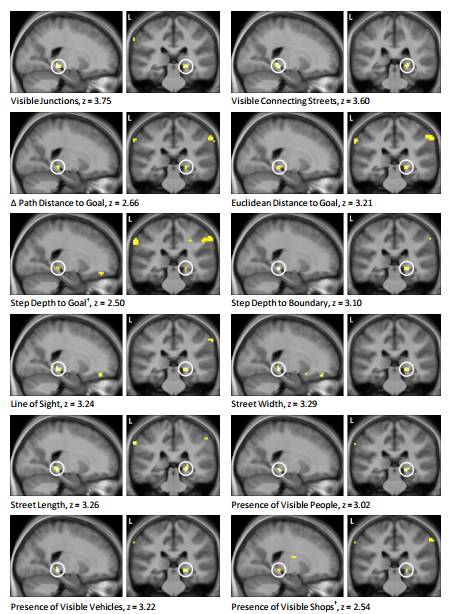
寻路过程中面对各种环境细节时,右海马体的活动。Javadi et al.
英国伦敦大学学院的Hugo Spiers及同事让24名被试认识伦敦苏活区的部分布局。然后,作者将向被试显示目的地目标的照片,并要求他们在这个虚拟社区中找路,并使用最短的路线到达目标。监测被试找路时的脑活动发现,右前部海马体的活动模式对应被试进入的实际街道的细节(比如发现岔路口,看到行人/商铺/车辆),而右后部海马体活动计算潜在未来路径的数量。有时候,作者强迫被试绕道,结果显示重新规划的过程涉及前额皮质区,前额皮质区的活动与绕道的难度相关联。
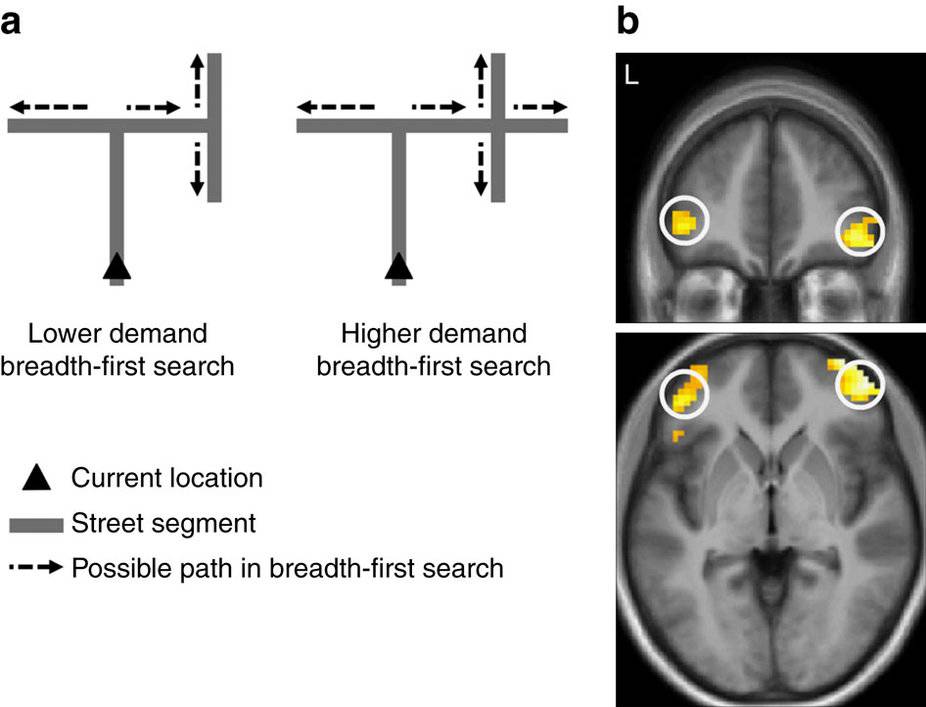
面对岔路时前额叶的活动。Javadi et al.
综合而言,这些结果显示了人脑如何计算潜在未来可能的数量,以及在初始规划被阻后,人脑如何重新规划和评估这些可能。